相关结构体
pt_regs 栈框
功能:用于保存中断现场或者异常现场
pt_regs 栈框通常位于进程的内核栈的顶部,保存了 sepc、x1~x31 通用寄存器、CRSs、orig_a0值。
sepc:Supervisor Exception Program Counter,当发生异常或中断时,将当前PC值保存到sepc中。、
CRSs:Supervisor CSRs,包括 sstatus、sbadaddr、scause。它们的的作用如下:
sstatus:保存处理器的状态sbadaddr:Supervisor Bad Address Register,保存导致异常的地址scause:保存导致异常或者中断的原因
orig_a0:用于系统调用。系统调用中,a0 通常用于传递系统调用号,orig_a0 保存了系统调用前的 a0 的值,便于在处理系统调用时可以访问该值。
内容:
/*
* pt_regs栈框,用来保存中断现场或者异常现场
*
* pt_regs栈框通常位于进程的内核栈的顶部。
* 保存内容:
* sepc
* x1 ~ x31 通用寄存器
* CSRs
*
* 一共需要保存36个寄存器,共288个字节
*/
struct pt_regs {
/* 31个通用寄存器 + sepc */
unsigned long sepc;
unsigned long ra;
unsigned long sp;
unsigned long gp;
unsigned long tp;
unsigned long t0;
unsigned long t1;
unsigned long t2;
unsigned long s0;
unsigned long s1;
unsigned long a0;
unsigned long a1;
unsigned long a2;
unsigned long a3;
unsigned long a4;
unsigned long a5;
unsigned long a6;
unsigned long a7;
unsigned long s2;
unsigned long s3;
unsigned long s4;
unsigned long s5;
unsigned long s6;
unsigned long s7;
unsigned long s8;
unsigned long s9;
unsigned long s10;
unsigned long s11;
unsigned long t3;
unsigned long t4;
unsigned long t5;
unsigned long t6;
/* Supervisor CSRs */
unsigned long sstatus;
unsigned long sbadaddr;
unsigned long scause;
/* a0 value before the syscall */
unsigned long orig_a0;
};cpu_context 处理器上下文
功能:描述了一个进程切换时 CPU 需要保存哪些寄存器的值,即处理器上下文。
在进程切换中,我们需要把 prev 进程的 s0~s11 寄存器、sp 寄存器、ra 寄存器保存到 cpu_context 数据结构中,然后把 next 进程中上一次保存的 cpu_context 的值恢复到处理器的寄存器中,这样就完成了进程上下文切换。
内容:
/* 进程切换时候需要保存的上下文 */
struct cpu_context {
unsigned long ra;
unsigned long sp; /* 栈指针 */
/* 函数调用必须要保存的通用寄存器 */
unsigned long s[12]; /* s[0] 是FP, 总共是 s0 ~ s11 */
};task_struct 进程控制块
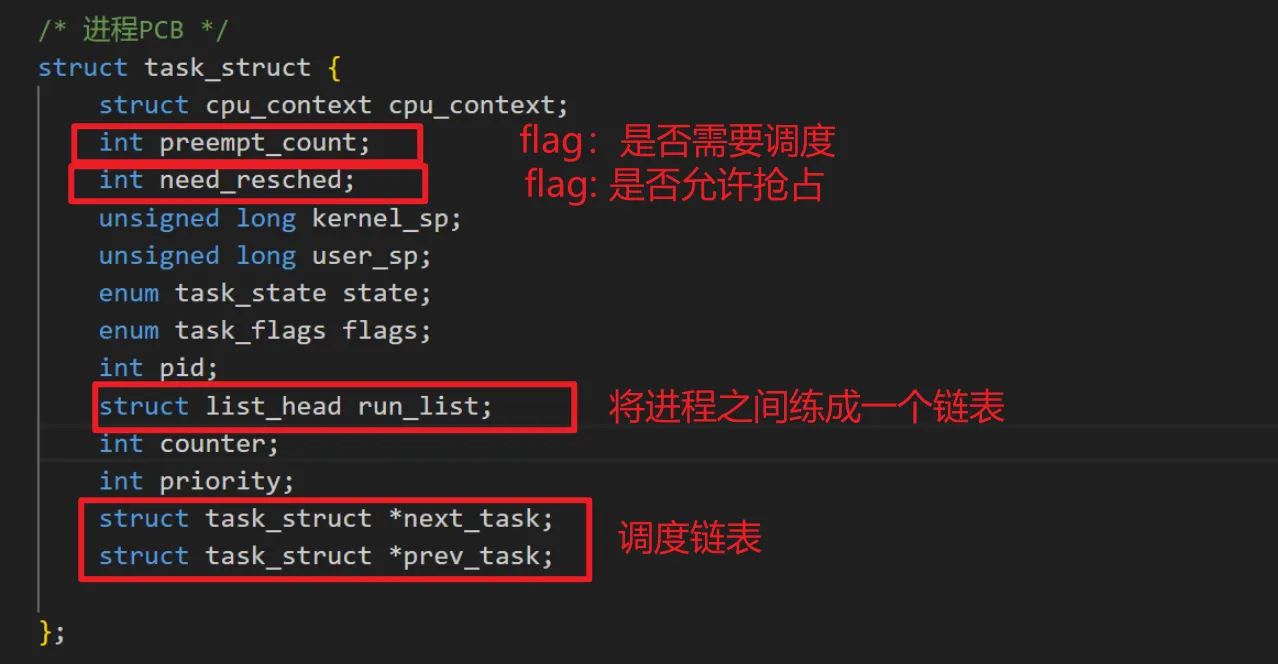
功能:进程控制块(Process Control Block,PCB),描述了一个进程的信息。
内容:
/* 进程PCB */
struct task_struct {
struct cpu_context cpu_context; // 进程切换时的硬件上下文
int preempt_count; // 抢占计数 *
int need_resched; // 是否需要重新调度 *
unsigned long kernel_sp; // 内核栈指针 *
unsigned long user_sp; // 用户栈指针 *
enum task_state state; // 进程状态
enum task_flags flags; // 进程标志, 目前只用来表示进程是否为内核进程
int pid; // 进程ID
struct list_head run_list; // 运行队列链表 *
int counter; // 进程调度用的时间片
int priority; // 进程优先级
struct task_struct *next_task; // 指向下一个任务的指针 *
struct task_struct *prev_task; // 指向上一个任务的指针 *
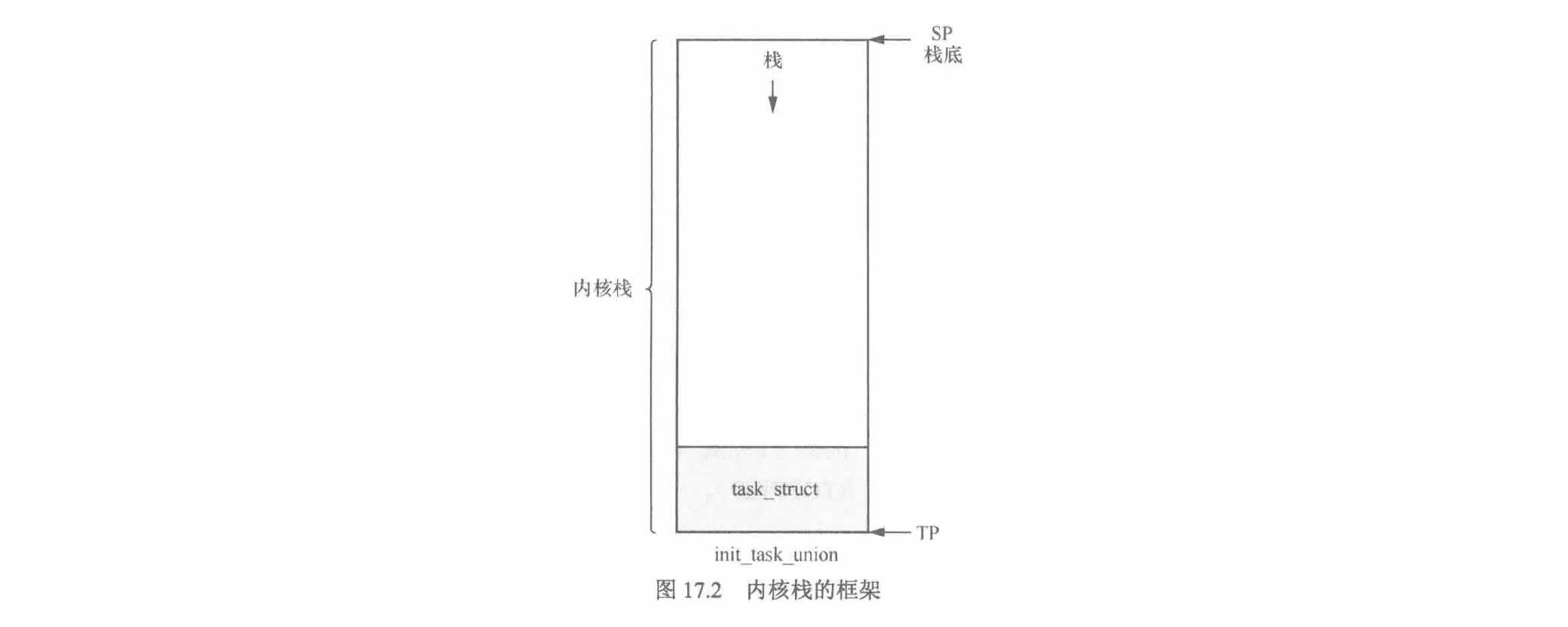
};task_union 内核栈
功能:task_union 将进程的内核栈和进程控制块紧密结合在一起,方便管理和调度,内核栈用于保存进程在内核态下执行时的临时数据和函数调用信息。
内容:
/*
* task_struct数据结构存储在内核栈的底部
*/
union task_union {
struct task_struct task;
unsigned long stack[THREAD_SIZE/sizeof(long)];
};BenOS 从启动到执行
在没有进程切换的情况下,BenOS 的启动流程是 上电 → MySBI 固件 → BenOS 汇编入口 → kernel_main() 函数。从进程的角度看,init 进程可以看出系统的 “0 号进程”。
由于现在考虑进程切换,所以将这个 0 号进程进行管理,之后再使用 do_fork() 函数即可创建新的进程。
系统上电后,RISC-V处理器运行在 M 模式。通常 SBI 固件运行在 M 模式下,为运行在 S 模式下的操作系统提供引导服务以及 SBI 服务。而后进入 BenOS 的初始化程序中,在 sbi_main.c 文件中,设置了 mepc 寄存器的地址为 0x8020 0000,而后执行 mret 指令会跳转到 0x8020 0000 地址处。BenOS 操作系统的S模式的入口地址也是 0x8020 0000,于是在 MySBI 执行后会进入 BenOS 操作系统 S 模式。
MySBI 固件启动到执行
MySBI 启动用的汇编代码,此时处理器运行在 M 模式,程序从 _start 段开始执行。
# file: "benos/sbi/sbi_boot.S"
.section ".text.boot"
.globl _start
_start:
/* 关闭M模式的中断*/
csrw mie, zero
/* 设置栈, 栈的大小为4KB */
la sp, stacks_start
li t0, 4096
add sp, sp, t0
/*
把M模式的SP设置到mscratch寄存器,
下次陷入到M模式可以获取SP
*/
csrw mscratch, sp
/* 跳转到C语言 */
tail sbi_main
.section .data
.align 12
.global stacks_start
stacks_start:
.skip 4096执行完这段汇编代码后进入 C 语言的 sbi_main() 函数执行。
# file: "benos/sbi/sbi_main.c"
/*
* 运行在M模式
*/
void sbi_main(void)
{
unsigned long val;
uart_init();
init_printk_done(putchar);
printk(BANNER);
sbi_trap_init();
/*
* 配置PMP
* 所有地址空间都可以访问
*/
sbi_set_pmp(0, 0, -1UL, PMP_RWX);
sbi_set_pmp(1, 0x80000000, 0x40000, PMP_RWX);
/* 设置跳转模式为S模式 */
val = read_csr(mstatus);
val = INSERT_FIELD(val, MSTATUS_MPP, PRV_S);
val = INSERT_FIELD(val, MSTATUS_MPIE, 0);
write_csr(mstatus, val);
delegate_traps();
/* 设置M模式的Exception Program Counter,用于mret跳转 */
write_csr(mepc, FW_JUMP_ADDR);
/* 设置S模式异常向量表入口*/
write_csr(stvec, FW_JUMP_ADDR);
/* 关闭S模式的中断*/
write_csr(sie, 0);
/* 关闭S模式的页表转换 */
write_csr(satp, 0);
/* 切换到S模式 */
asm volatile("mret");
}sbi_main() 函数的主要目的是把处理器从 M 模式切换到 S 模式,并跳转到 S 模式的入口地址处。
BenOS 0号进程的创建
BenOS 内核启动用的汇编代码,位于 benos/src/boot.S 文件中,内容如下:
.section ".text.boot"
.globl _start
_start:
/* 关闭中断 */
csrw sie, zero
call __init_uart
call print_asm
/* 设置栈: init_task_union + THREAD_SIZE*/
la sp, init_task_union
li t0, THREAD_SIZE
add sp, sp, t0
la tp, init_task_union
//call create_page_table
//call enable_mmu_relocate
/* 跳转到C语言 */
tail kernel_main由于现在有进程切换的概念,所以当前要做的是创建并执行 0 号进程。由于进程需要有进程控制块来描述,还需要用到栈空间,以及将 SP 指向栈底和TP指向task_struct 结构体。所以,使用 INIT_TASK 宏来静态初始化 0 号进程的进程控制块,再将 0 号进程的内核栈空间链接到数据段,并设置 SP 和 TP。
创建 0 号进程的进程控制块
/* 0号进程即init进程 */
#define INIT_TASK(task) \
{ \
.state = 0, \
.priority = 10, \
.counter = DEF_COUNTER, \
.flags = PF_KTHREAD, \
.pid = 0, \
.preempt_count = 0, \
.need_resched = 0, \
.next_task = (struct task_struct *)&task, \
.prev_task = (struct task_struct *)&task, \
}
/* 0号进程为init进程 */
union task_union init_task_union __init_task_data
= {INIT_TASK(init_task_union.task)};为 0号进程分配栈空间,并将内核栈编译链接到.data.init_task段中
/* 把0号进程的内核栈 编译链接到.data.init_task段中 */
#define __init_task_data __attribute__((__section__(".data.init_task")))
/* 定义一个全局的task_struct数组来存放进程的PCB*/
struct task_struct *g_task[NR_TASK] = {&init_task_union.task,};设置 SP,使 SP 指向栈底;设置 TP(Thread Pointer,线程指针),指向 task_struct 数据结构,这样可以通过 TP 获取当前进程的 task_struct 数据结构。
/* 设置栈: init_task_union + THREAD_SIZE*/
la sp, init_task_union
li t0, THREAD_SIZE
add sp, sp, t0
la tp, init_task_union而后,通过 tail kernel_main跳转到 C 语言,继续执行后面的操作。
BenOS 内核启动和执行
kernel_main() 函数中,主要执行的操作为:sched_init() 配置进程调度,trap_init() 配置中断和异常的处理,mem_init() 和 paging_init() 初始化内存管理,包括物理内存和分页机制,do_fork() 创建内核线程。

内核态进程的切换
一个进程有内核栈和 task_struct 信息,task_struct 中有 cpu_context 信息,在进程切换中,需要完成的事情有:
- 保存当前CPU上下文到
prev进程的task_struct->cpu_context,再从next进程的task_struct->cpu_context中恢复上下文到CPU - 让
tp寄存器的值指向next进程的task_struct
进程切换函数 switch_to
struct task_struct * switch_to(struct task_struct *prev, struct task_struct *next)
{
if (prev == next)
return NULL;
return cpu_switch_to(prev, next);
}cpu_switch_to 的汇编实现:
.align 2
.global cpu_switch_to
cpu_switch_to:
li a4, TASK_CPU_CONTEXT
add a3, a0, a4
add a4, a1, a4
/* 保存CPU上下文到prev进程的task_struct->cpu_context */
sd ra, 0(a3)
sd sp, 8(a3)
sd s0, 16(a3)
sd s1, 24(a3)
sd s2, 32(a3)
sd s3, 40(a3)
sd s4, 48(a3)
sd s5, 56(a3)
sd s6, 64(a3)
sd s7, 72(a3)
sd s8, 80(a3)
sd s9, 88(a3)
sd s10, 96(a3)
sd s11, 104(a3)
/* 从next进程的task_struct->cpu_context中恢复上下文到CPU */
ld ra, 0(a4)
ld sp, 8(a4)
ld s0, 16(a4)
ld s1, 24(a4)
ld s2, 32(a4)
ld s3, 40(a4)
ld s4, 48(a4)
ld s5, 56(a4)
ld s6, 64(a4)
ld s7, 72(a4)
ld s8, 80(a4)
ld s9, 88(a4)
ld s10, 96(a4)
ld s11, 104(a4)
/* tp point to task_struct*/
move tp, a1
ret进程的调度
由于有进程的调度,所以需要扩展 task_struct 结构体的内容。在之前进程的创建和执行时,有优先级,状态、ID等信息。
task_struct 是使用数组来存储的,而进程之间的前后调度关系是使用链表来表示的。
调度涉及到的数据结构
两个数据结构,用于辅助完成调度这项任务的。
struct sched_class类似于调度类的接口,每个调度类需要实现一组函数,用于管理进程的调度。struct run_queue定义了运行队列的数据结构,用于管理所有就绪状态的进程,并记录当前运行的进程和调度器的性能信息。这样可以用于后面更好的选择优先级。
简易调度实现
这个调度算法通过 counter 值来决定进程的调度顺序。每个时钟滴答减少当前进程的 counter 值,当 counter 值为0时,重新选择一个 counter 值最大的进程运行。如果所有进程的 counter 值都为0,重置所有进程的 counter 值。这个算法类似于时间片轮转调度,但加入了优先级的考虑。在这里的优先级就是:哪个进程的时间片剩余时间长,哪个调度算法更优先。
在 BenOS 中,简易的调度算法实现为 pick_next_task_simple 函数。用于选择下一个进程。步骤为:
- 遍历运行队列,计算每个进程的权重(
goodness),选择权重最大的进程。(在代码中的实现是指,时间片越长,权重越大) - 重置。如果进程一直运行,会有counter执行完的时候,这时候就所有进程的权重都设置为0,重置所有进程的
counter值,然后重新遍历运行队列。
source:操作系统-Benos源码分析-2025.01.05